
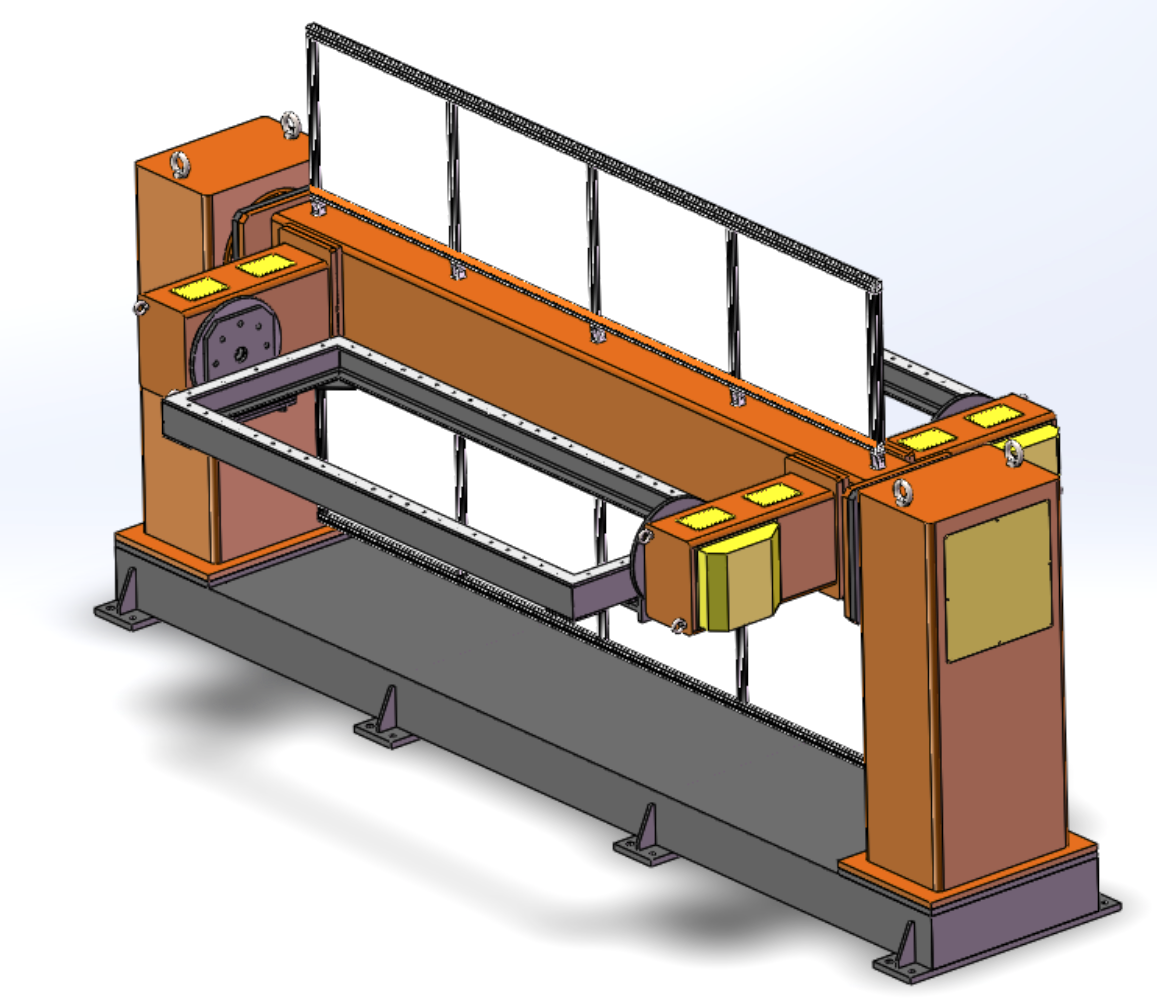
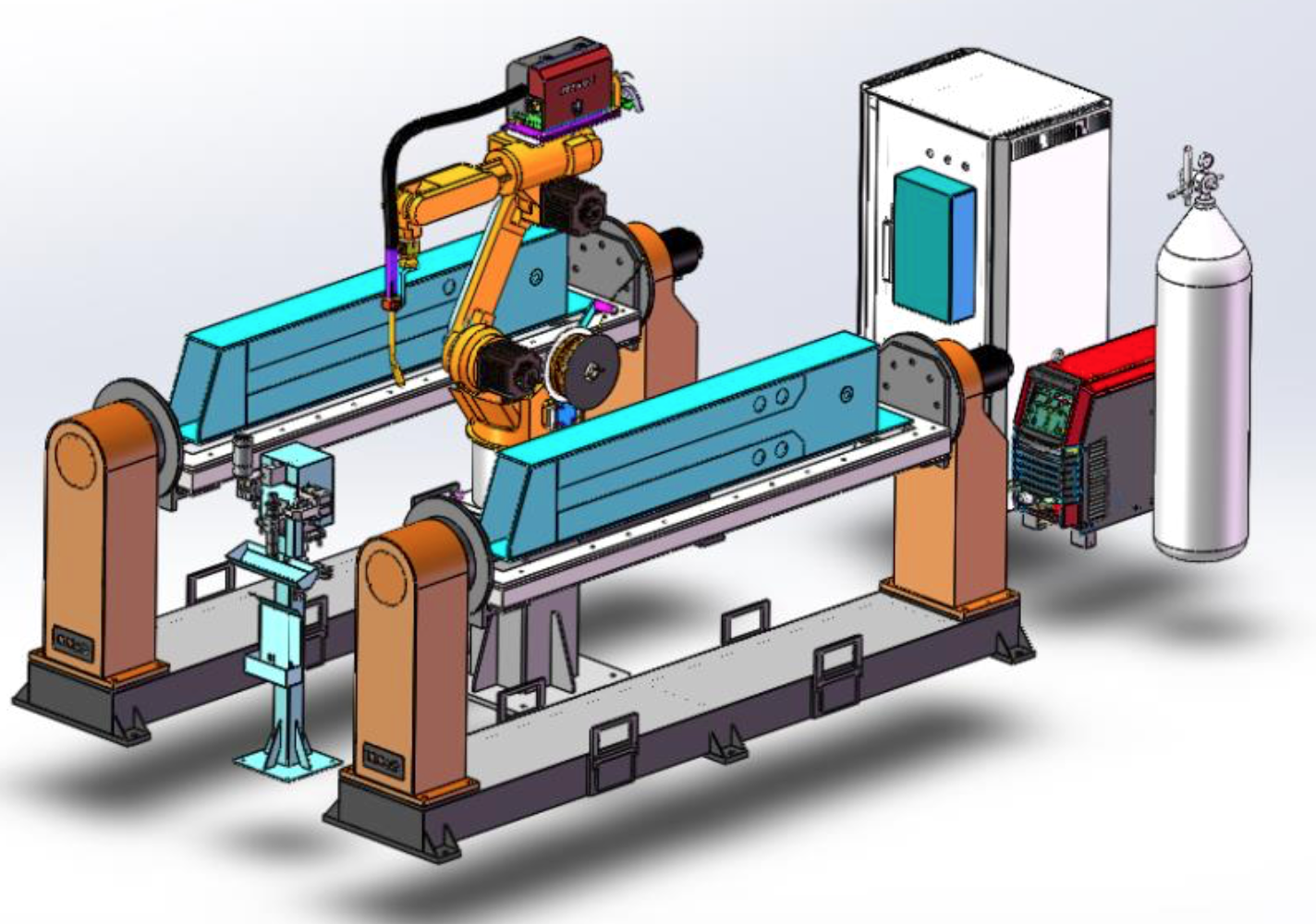
Двухстоечные позиционеры для роботов, GSK (PRC)
 купить от поставщика ООО \"Техновелд\"")
 купить от поставщика ООО \"Техновелд\"")
 купить от поставщика ООО \"Техновелд\"")
 купить от поставщика ООО \"Техновелд\"")
 купить от поставщика ООО \"Техновелд\"")

Двухстоечные позиционеры предназначены для сборки и сварки деталей с использованием поворотного механизма для вращения изделия вокруг горизонтальной оси. Приспособление позволяет переворачивать раму, установленную на промежуточной хребтовой балке для удобства сварки со всех сторон. Позиционеры эффективно используются при роботизированной сварке.
Технические характеристики позиционеров GSK
| Номинальная нагрузка | 1000кг |
| Номинальный крутящий момент | 1000 Нм |
| Радиус поворота | 700 мм |
| Максимальный угол поворота | ±360° |
| Номинальная скорость поворота | 15 об/мин |
| Точность повторного позиционирования | ±0.1 мм |
| Размер рамки | 2500 х 1200 х 130 мм |
| Габаритные размеры | 3250 х 550 х 1100 мм |
| Диаметр шпинделя | 400 мм |
| Высота центра оси | 900 мм |
| Условия подключения * | 7 осевой / 8 осевой робот контроллер |
| Масса |
600 кг |
* - Совместим с роботом GSK

Конструктивные особенности роботов GSK
Ключевыми функциональными компонентами являются: контроллер (шкаф электрооборудования и блок обучения), серводвигатель серии SJTR, блок синхронного сервопривода переменного тока серии GE, гипоциклоидальный поперечно-роликовый редуктор.
Контроллер (шкаф и блок обучения)

- Самая современная система дистанционного управления GSK позволяет роботу оптимизировать ускорение/замедление исходя из фактической нагрузки, насколько это возможно, чтобы сократить продолжительность рабочего периода.
- Робот может контролировать движение и нагрузку, а также оптимизировать требования к обслуживанию с помощью встроенной информационной системы (SIS), которая обеспечивает повышенную продолжительность непрерывного рабочего периода.
- Встроенный контроллер робота на основе аппаратной структуры ARM + DSP + FPGA с управлением по 4-8 осям, быстродействие арифметического устройства до 500 миллионов операций в секунду, высокоскоростная шина управления движением Ethernet RS232, RS485, CAN и любой интерфейс DeviceNet, непрерывное отслеживание обучения и онлайн-обучение, функции дистанционного мониторинга и диагностики.
- Внутренняя шина робота (GSK-Link): высокая скорость управления в реальном времени, устранение противоречий между пропускной способностью и управлением в реальном времени, сочетание скорости передачи данных и управления в реальном времени, решение проблем взаимодействия передачи данных в реальном времени между различными модулями.
- Технология динамического контроля идентификации с самоадаптацией: с учетом силы тяжести, силы Кориолиса, центробежной силы и иных внешних сил, применяется технология контроля идентификации с самоадаптацией для улучшения динамических характеристик робота.

| Тип | GSK-RC | |
| Система управления | Метод обучения | Программирование обучением/дистанционное управление |
| Режим привода | Цифровая шина сервопривода переменного тока | |
| Количество контролируемых осей | Шесть осей (расширение до восьми осей) | |
| Метод контроля положения | PTP/CP | |
| Контроль скорости | TCP постоянный контроль скорости | |
| Система координат | Общие координаты/декартовы координаты/пользовательские координаты/координаты инструмента | |
| Память | Память | Флэш-память |
| Емкость памяти | 256 Мбайт | |
| Содержимое памяти | Точка, линия, дуга, команда условия и т. д. | |
| Действия | Функция интерполяции | Линейная интерполяция, дуговая интерполяция |
| Скорость ручного управления | 5 регулируемых уровней (ограничение скорости 250 мм/с) | |
| Редактирование | Добавить, ввести, копировать, вырезать удалить, изменить, проверить | |
| Вход внешнего управления | Настройка условий | Настройка условий в программе |
| Общий физический вход/выход | Панель цифрового ввода/вывода, стандартный ввод/вывод, 32 точки, соответственно, расширение и поддержка 2 аналоговых выходов | |
| Сфера применения | Дуговая сварка, перенос, покрытие слоем резины, распыление и т. д. | |
| Связь с внешним оборудованием | USB, Ethernet Modbus TCP | |
| Защита | Механический датчик предотвращения соударений сварочной горелки, датчик предотвращения соударений с сервоприводом, программный предел положения, механический аппаратный предел (частичные оси), шкаф управления | |
| Техническое обслуживание | Регулярно проверяйте отклонения в журнале эксплуатации | |
| Обнаружение отклонений | Отклонения аварийных остановок, отклонения временной последовательности управления, отклонения сервопривода, отклонения диска кодирования, отклонения блока обучения, отклонения работы пользователя, отклонения точечной сварки, отклонения дуговой сварки, отклонения датчика | |
| Диагностика | Диагностика кнопки, диагностика сигнала, диагностика аварийного сигнала и т. д | |
| Точка возврата в первоначальное положение | Поддерживается кодировка галетной батареи; отсутствует необходимость возврата в первоначальное положение при каждом запуске. | |
| Система охлаждения | Воздушное охлаждение | |
| Уровень шума | <70 дБ | |
| Диапазон температуры/ влажности окружающего воздуха | от 0 до 40 °C (без минуса) / от 0 до 90% относительной влажности (без минуса) | |
| Электрическое питание | Трехфазное 220 В переменного тока 50/60 Гц (однофазное для некоторого количества моделей). Примечание: робот в стране экспортера подлежит настройке в соответствии с местным напряжением | |
| Заземление |
Специальное заземление для робота класса D или выше |
|
Серводвигатель серии SJTR

- Обладает оптимальной электромагнитной конструкцией, низким уровнем шума, надежностью и высокой эффективностью.
- В нем используется высокопроизводительный редкоземельный материал с постоянным магнетизмом, обладающий отличными характеристиками на низких скоростях и способностью к большим перегрузкам (3 раза).
- Используется 17-разрядный высокоскоростной и высокоточный фотоэлектрический датчик, который может обеспечить высокоточное управление в сочетании с высокопроизводительным приводным устройством.
- Используется импортный высокоточный подшипник и ротор с высокоточными динамическими технологиями для обеспечения стабильности и надежности работы двигателя, низкого уровня вибрации и шума при работе в диапазоне высоких скоростей.
- Двигатель может надежно работать при температуре окружающего воздуха от -15°до 40°, даже при наличии в окружающем воздухе пыли и масляного тумана.
- Высокий коэффициент инерции и крутящий момент.
| Тип | Номинальная мощность, кВт | Номинальный ток, A | Нулевой крутящий момент, Нм | Номинальный крутящий момент, Нм | Верхний крутящий момент, Нм |
Ном. скорость, об/мин |
Макс. скорость, об/мин |
Инерция вращения кг/м2 |
| 60SJTR-MZ003E | 0.1 | 1.2 | 0.318 | 0.318 | 0.955 | 3000 | 5000 | 0.05x104 |
| 60SJTR-MZ005E | 0.16 | 1.65 | 0.5 | 0.5 | 1.5 | 3000 | 5000 | 0.07xl04 |
| 80SJTR-MZ006E | 0.2 | 2.9 | 0.637 | 0.637 | 1.91 | 3000 | 6000 | 2.71x10 s |
| 80SJTR-MZ010E | 0.3 | 3.1 | 1 | 1 | 3 | 3000 | 6000 | 3.36x105 |
| 80SJTR-MZ013E | 0.4 | 3.3 | 1.27 | 1.27 | 3.81 | 3000 | 6000 | 3.88 x10 s |
| 150SJTRG-MZ040C | 0.84 | 5.5 | 4 | 4 | 12 | 2000 | 3500 | 1.3x103 |
| 150SJTRG-MZ060C | 1.26 | 8.6 | 6 | 6 | 18 | 2000 | 3500 | 1.9xl03 |
| 150SJTRG-MZ080C | 1.68 | 11.2 | 8 | 8 | 24 | 2000 | 3500 | 2.9xl03 |
| 150SJTRG-MZ100C | 2.1 | 14.3 | 10 | 10 | 30 | 2000 | 3500 | 3.4x103 |
| 150SJTRG-MZ120C | 2.5 | 14.5 | 12 | 12 | 33.8 | 2000 | 2800 | 3.9x103 |
Синхронный сервопривод переменного тока серии GE

Синхронный сервопривод переменного тока серии GE, включая GE2000 (источник питания 220 В) и Ge3000 (источник питания 380 В), использует интерфейс связи промышленной шины Ethernet, недавно разработанный GSK, с удобной настройкой параметров сервопривода, простым интерфейсом, высокой стабильностью и широкой совместимостью. Может быть адаптивным к инкрементным датчикам положения и большой линейке 17-разрядных абсолютных датчиков положения для реализации в системах управления без обратной связи и системам управления с обратной связью, которые соответствуют роботам, станкам с ЧПУ, автоматическому и иному оборудованию.
- Используется метод передачи данных по промышленной шине Ethernet для увеличения скорости передачи данных до 100 Мбит/с.
- Повышенная устойчивость к помехам, коэффициент ошибок: 10-12, минимальный цикл связи: 50. Подходит для серводвигателей мощностью 0,1~12 кВт.
- Серия GE в сочетании с моментным двигателем используется в качестве поворотного стола с прямым приводом, высокой точностью позиционирования и высокой скоростью движения.
- Имеется возможность удобной настройки параметров сервопривода.
- Изменение параметров сервомотора и мониторинга состояния сервомотора может быть выполнено в системном интерфейсе робота.
- В абсолютных сервоприводах GE в сочетании с системами роботизированной шины можно реализовать функцию сохранения данных после отключения питания системы координат и приступать к работе без отладки после повторного включения питания.
- Улучшенные характеристики при работе на низких скоростях, соответствие высокому моменту инерционной нагрузки и динамических характеристик отклика для удовлетворения требованиям при эксплуатации любых роботов.
Гипоциклоидальный поперечно-роликовый редуктор

- Компактная конструкция: Осевой размер трансмиссии может быть уменьшенным и компактным из-за конструкции трансмиссии в опорном шпинделе планетарной шестерни.
- Высокая несущая способность: поскольку в одинаковых условиях радиус кривизны гипоциклоида больше, чем у эпициклоида, его несущая способность превышает несущую способность эпициклоида.
- Стабильный привод и длительный срок службы: использование двухступенчатой редукторной схемы делает работу планетарного редуктора с низким числом оборотов циклоидного штифта более стабильной, при этом срок службы качающегося подшипника значительно повышается, поскольку длительность увеличивается, а скорость движения внутреннего/наружного кольца уменьшается.
- Минимальный люфт: оптимизированная конструкция обеспечивает небольшую погрешность изготовления, высокую точность движения и небольшой люфт.
- Хорошая выходная жесткость: в конструкции гипоциклоидной планетарной трансмиссии используется встроенный поперечный роликовый подшипник с максимальной поддержкой с обоих концов, насколько это возможно, для придания большей выходной жесткости конструкции диска, жесткость которого превышает выходную жесткость конструкции RV циклоидальных редукторов (конструкция радиально-упорного подшипника) со значительно улучшенной ударопрочностью.
- Полая конструкция: полая конструкция удобна для размещения робота, уменьшения его базового размера и защиты от воздушных потоков.
|
Выходная скорость, об/мин |
5 | 15 | 20 | 25 | 30 | |||||
| Тип | Выходной крутящий момент, Нм | Входная мощность, кВт | Выходной крутящий момент, Нм | Входная мощность, кВт | Выходной крутящий момент, Нм | Входная мощность, кВт | Выходной крутящий момент, Нм | Входная мощность, кВт | Выходной крутящий момент, Нм | Входная мощность, кВт |
| GSK-BJW-20E | 231 | 0.16 | 167 | 0.35 | 153 | 0.43 | 143 | 0.5 | 135 | 0.57 |
| GSK-BJN-40E | 572 | 0.4 | 412 | 0.86 | 377 | 1.05 | 353 | 1.23 | 334 | 1.4 |
| GSK-BJN-50C | 681 | 0.48 | 490 | 1.03 | 450 | 1.26 | 420 | 1.47 | 398 | 1.67 |
Примечание. Выходной крутящий момент оценивается при выходной скорости 15 об/мин.
| Тип | Передаточное число |
Максимальное значение выходной скорости, об/мин |
Верхний сухой ход, шкала, мин |
Максимально допустимый крутящий момент, Нм |
Жесткость при кручении, Нм/дуга, мин |
U, кг |
| GSK-BJW-20E | 121 | 75 | 1 | 833 | 49 | 5 |
| 105 | ||||||
| 71.77 | ||||||
| GSK-BJN-40E | 121 | 70 | 1 | 2058 | 108 | 9.9 |
| 105 | ||||||
| 73.94 | ||||||
| 52.4 | ||||||
| GSK-BJN-50C | 33.39 | 50 | 1 | 2450 | 255 | 17 |
Крупнейшие партнеры GSK

Опции и услуги к данному оборудованию
-
 Сварочное оборудование
Сварочное оборудование
-
 Автоматизация сварки
Автоматизация сварки
- Сварочные колонны
- Установки для сварки кольцевых швов
- Установки для сварки продольных швов
- Линии для сварки балок
- Установки для сварки вертикальных резервуаров
- Установки для сварки кузовов самосвалов
- Установки для сварки цистерн чемоданного и элипсовидного типа
- Установки для вваривания патрубков и штуцеров
- Сварка газоплотных панелей
-
 Роботизация сварки
Роботизация сварки
-
 Оборудование плазменной резки
Оборудование плазменной резки
- Станки плазменной резки металла с ЧПУ
- Автоматические источники плазменной резки металла
- Ручные источники плазменной резки металла
- Консольные машины плазменной резки металла с ЧПУ
- Системы плазменной резки труб с ЧПУ
- Станки для вырезки отверстий в обечайках
- Портативные машины для резки металла
- Резаки плазменной резки
-
Расходные части для резаков плазменной резки
-
Фильтровентиляционные установки
-
 Оборудование лазерной резки
Оборудование лазерной резки
-
 Лазерная сварка и очистка
Лазерная сварка и очистка
-
 Механизация сварки
Механизация сварки
-
 Сборочно-сварочные столы
Сборочно-сварочные столы
-
 Ленточнопильные станки по металлу
Ленточнопильные станки по металлу
-
 Листогибочные прессы
Листогибочные прессы
-
 Сварочные горелки
Сварочные горелки
-
 Сварочные материалы
Сварочные материалы
-
 Аксессуары для сварки
Аксессуары для сварки
- Сварочные маски
- Электродержатели для сварки
- Клемы заземления для сварки
- Строгачи для ручной дуговой сварки и резки ММА
- Держатели сварочных горелок
- Антипригарные средства
- Краги для сварщика
- Очки и маски защитные
- Охлаждающие жидкости
- Станции очистки горелок
- Магнитные фиксаторы
- Вспомогательный инструмент
- Прочее
-
 Газосварочное оборудование
Газосварочное оборудование
-
 Сверление
Сверление
-
 Компрессорное оборудование
Компрессорное оборудование
-
 Дробеметное оборудование
Дробеметное оборудование
-
 Абразивный инструмент
Абразивный инструмент
-
 Контактная сварка
Контактная сварка
-
Клещи контактной сварки
-
Машина контактной точечной и рельефной сварки
- Настольные машины контактной точечной и рельефной сварки
- Модульные машины контактной точечной и рельефной сварки TECNA (Италия)
-
Сварочное оборудование для автосервисов и кузовных станций
- Измерительный инструмент параметров контактной точечной и рельефной сварки TECNA (Италия)
- Тали-балансиры TECNA (Италия)
- Блоки управления-регуляторы контактной точечной и рельефной сваркой TECNA (Италия)
- Трансформаторы для контактной сварки TECNA (Италия)
-
Клещи контактной сварки
-
 Пневматические компоненты
Пневматические компоненты



